The efficiency of a Peltier element application depends on the coefficient of performance (COP), which depends on the operating point, the thermal design and the TEC Controller supply type. All three points are discussed in this article.
TEC Controllers are used for thermoelectric cooling and heating in combination with Peltier elements. Peltier elements are heat pumps which transfer heat from one side to the other, depending on the direction of the electrical current.
- Coefficient of Performance (COP)
- Thermal Design
- DC vs. PWM (TEC Power supply type)
- Linear vs. SMPS TEC Controllers
The 3 golden rules of peltier element efficiency
To obtain the maximum efficiency when cooling with Peltier elements, there are the three golden rules.
- I / Imax when dT < 25 K
I / Imax should be in the lower third (0 - 0.33 x Imax) - I / Imax when dT > 25 K
I / Imax should be in the middle third (0.33 - 0.66 x Imax) - Cool the hot side as much as possible while cooling (Heat Sink, Fan ...)
These rules of thumb will give you a solid start in designing your most efficient thermal system that cools with Peltier elements. However, there are a number of other factors that lead to high efficiency when using Peltier elements.. These are explained below.
Coefficient of Performance (COP)
The efficiency of the Peltier element itself is defined by the COP = QC / Pel. Read more about the Definition of COP here.

COP vs. current relationship of a Peltier element for different dT.
The optimal operating point of a Peltier element is when COP is maximum. The COP maximum depends strongly on the temperature difference (dT) between the warm and cold side. As it can be seen the COP maximum shifts towards higher currents when the dT is increasing. The current should not be larger than 0.7 times Imax because then the COP becomes too small— the Peltier element is very inefficient.
Thermal Design
Thermal Design is crucial because it allows the user to directly influence the efficiency and performance of the system.
The three most common ways for improving the Peltier element efficiency in case of cooling are:
- Reducing dT – optimize heatsink and fan
- Minimize power losses - isolate the cooled area
- Optimize COP - Select Peltier element of adequate power
Reducing dT
The temperature difference (dT) between the cold and warm side should be minimized. A small dT will lead to the COP maximum, as it can be seen in diagram 5, being shifted to the right, which means a smaller current is necessary. The heat to be dissipated on the warm side is composed as follows Q h=QC+ Pel.
The next schematic represents the cooling system and the corresponding temperature diagram on the right. The object is cooled down to -5 °C, by the cold side of the Peltier element. The hot side of the Peltier element is at 35 °C. The heat sink dissipates the heat to the surrounding air, which is at 25 °C. The heatsink thus dissipates 10 °C, so the new dT is 30 K.
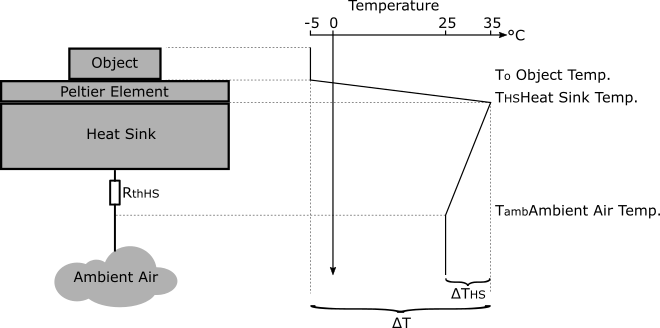
A more simplified schematic for the design process and the corresponding temperature diagram
Minimize power losses
It is often beneficial to insulate the object to be cooled and all other cooled surfaces. Thus, the ambient temperature has less effect on the Peltier element and less ambient heat is introduced into the system. This reduces the total power dissipation resulting in a smaller imput power of the Peltier Element and thus a better COP.
Optimize COP
The COP should be optimized by using enough Peltier element power. This is necessary because the COP Maximum is at a low current and interference can be absorbed. If the Peltier elements power is too low it is possible that a heater is created.
As an example: If dT of 20 K, you can see in the diagram COP vs current relationship the COP maximum is at I = 0.3 * Imax. In the diagram Heat Pumped Vs Current we obtain, with the values dT = 30 K and I = 0.3 * Imax, Qc / Qmax equal to 20%. If 10 W is to be cooled, the Peltier element must have an power of 50 W.
DC vs. PWM (TEC Supply Type)
The following chapter discuss the advantages of direct current (DC current) and disadvantages of PWM as power supply modes for driving Peltier elements with TEC controllers. Thermoelectric coolers operate by the Peltier effect and pump heat from one to another side. To maintain the direction of the heat flow, DC current is required.
In many TEC Controllers, PWM is used to drive Peltier elements.In general, this means simplified hardware and logical control of the output. For high frequencies the PWM current can be viewed as direct current of the same amplitude value. However, TEC modules driven by PWM are always less efficient than TEC applications controlled by direct current. Driving TECs with PWM directly makes the circuit more prone to interferences, can lead to high transient voltages and is generally less efficient.
Another issue is that PWM may cause electro-magnetic interference (EMI) in the wiring to the TEC device. That effect could disturb measuring systems or cameras, e.g. when used to cool CCD sensors.
Recommendations of the manufacturers
Manufacturers of Peltier elements suggest using direct current and limiting current ripple for the regulation of the output current. They explicitly advise against the usage of direct PWM control of Peltier elements:
- Ferrotec: "However we recommend limiting power supply ripple to a maximum of 10 percent with a preferred value being <5%."
- RMT: "TEC [Peltier elements] controlled by PWM operates less effectively than at DC current. The PWM control is always less effective than TEC operation at the same average DC current and power consumption."
- Marlow: "Thermoelectric coolers require smooth DC current for optimum operation. A ripple factor of less than 10% will result in less than 1% degradation in ∆T. [...] Marlow does not recommend an ON/OFF control."
Due to the above reasons, Meerstetter only sells DC driven TEC controllers.
Comparison of two TEC Controllers
We compared a Meerstetter Engineering TEC controller with DC current (case 1) against a PWM TEC controller (case 2) from another manufacturer to emphasize the difference between thermoelectric cooling systems powered by DC current and systems using PWM. The goal is to compare the overall energy efficiency.
Both controllers fulfil the same task, but in terms of efficiency the difference is quite striking.
The setup consists of the following components:
- Power supply for TEC controller
- TEC controller
- Object to be cooled (1 W load)
- Peltier element
- Heat sink
- Fan to cool the heat sink
As target temperature for the 1 W load as object to be cooled, we chose in both cases 10 °C in an ambient temperature of 24.5 °C.
The results are presented in the following illustration and are discussed below.

Comparsion of two TEC Controllers
Remarkable differences and observations are:
- The power needed to cool the object down to 10 °C was in case 2 more than six times more (56 W vs. 9 W)
- The heatsink temperature in case 2 was 5 °C higher. This can lead to a higher temperature in the thermoelectric cooling system, especially when it is enclosed in a case.
- The 5 K higher heatsink temperature also results in a higher dT of the Peltier element:
dT = THS - TO = Tamb + ΔTHS - TO - In other words, the total amount of heat to be dissipated of the system using a PWM controller is more than 4 times larger. Hence, this results in the necessity of a much bigger heatsink for case 2.
- A more efficient system allows also the usage of smaller components, like power supply or heatsink etc.
Linear vs. SMPS TEC Controllers
There are two ways commonly used to generate DC current for driving TECs. One way is to use a linear power supply, while the other one is a SMPS.
Linear TEC Controllers deliver direct current witch results in the TEC working optimally. However, they are very inefficient themselves and generate high heat losses.
SMPS TEC controllers drive the TECs with direct current as well, but they are much more efficient which results in substantially less heat losses. Therefore, SMPS TEC controllers have a high efficiency (>90%), the electronics generate few losses.